O que significa frequent?
Frequentar algo significa participar ou estar presente regularmente em determinado local ou atividade. É importante entender a frequência como um ato contínuo e constante.
O que significa prompt?
Você sabe o que significa prompt? Se você é um entusiasta da tecnologia ou alguém que adora mergulhar no mundo da programação, com certeza já deve ter se deparado com esse termo. Mas afinal, o prompt é apenas uma linha de comando ou vai além disso? Descubra agora mesmo!
O que significa number?
Descubra o significado por trás do termo "number" e como esse conceito matemático está presente em diversas áreas da vida cotidiana. Entenda sua importância e como ele nos ajuda a compreender e quantificar o mundo ao nosso redor.





O que significa ter síndrome de Sjögren?
Você já se perguntou o que significa ter síndrome de Sjögren? Essa…









O que significa assunto na matemática?
Matemática, a pedra angular do conhecimento numérico, muitas vezes nos desafia com…

O que significa volume na matemática?
O volume na matemática é uma dimensão mágica que transforma formas e…

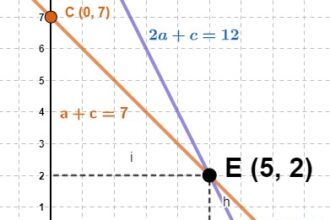
O que significa associação na matemática?
Já se questionou sobre o que significa associação na matemática? Muito além…
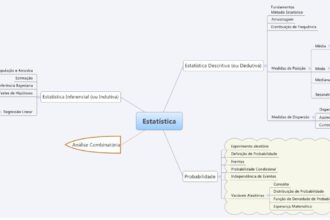
O que significa estatística na matemática?
A estatística na matemática é como uma lente que nos permite enxergar…

O que significa fator?
O fator, este enigma quase misterioso que permeia nosso universo matemático, representa…

O que significa atrito na matemática?
Uma sensação de hesitação e resistência surge quando dois corpos se encontram,…

O que significa áreas de figuras geométricas?
Desde os tempos antigos, figuras geométricas têm sido um fascínio para os…
O que significa capitalismo?
O que significa capitalismo? É um conceito que se desdobra em um verdadeiro oceano de interpretações e debates. Desde sua origem na Revolução Industrial até os dias atuais, o capitalismo abrange os pilares da propriedade privada, da livre iniciativa e do mercado competitivo. Mas, será que esse sistema econômico tem se mostrado eficiente e sustentável para todos? Exploraremos essas questões e muito mais neste artigo, mergulhando nas profundezas desse complexo sistema que molda nossa sociedade contemporânea.





O que significa FOMO?
Você já se sentiu como se estivesse perdendo alguma coisa importante quando não está nas redes sociais? Isso é o FOMO (Fear of Missing Out). Descubra o significado desse termo…