O que significa challenge?
Desafio, em inglês, significa challenge. É uma forma de superar obstáculos, alcançar objetivos e testar seus limites. Pode ser uma oportunidade de crescimento e aprendizado.

O que significa formula?
A fórmula, por definição, é um conjunto de símbolos matemáticos que representam uma relação ou um procedimento específico. Mas, para além disso, a fórmula é como uma chave mágica que abre as portas do conhecimento, desvendando os segredos do universo e da natureza. É um tesouro guardado pelos sábios de todas as eras, uma linguagem universal que nos permite decifrar…

O que significa intervention?
O termo "intervenção" é permeado de significados e conotações intrigantes. Ele evoca a ideia de interferir, seja para resolver problemas, promover mudanças ou até mesmo impor uma nova ordem. Mas o que realmente significa "intervenção"? Neste artigo, vamos explorar sua essência e desvendar os diversos matizes desse conceito tão complexo. Desperte sua curiosidade e embarque nessa jornada de descoberta e…






O quê significar ser intolerante à lactose?
Você já se perguntou o que significa ser intolerante à lactose? É…






O que significa assíntota na matemática?
As assíntotas são como linhas invisíveis que atraem ou afastam uma curva,…

O que significa aproximação na matemática?
A aproximação na matemática é uma poderosa ferramenta que nos permite obter…
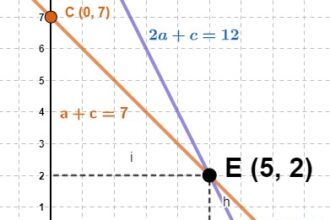
O que significa equação?
O que significa equação? Quando mergulhamos no universo da matemática, nos deparamos…

O que significa equações exponenciais?
Você já se perguntou o que significam equações exponenciais? Essas equações misteriosas,…

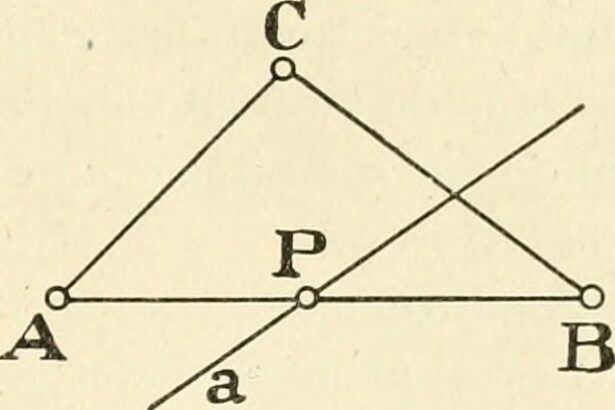
O que significa geometria na matemática?
Geometria, uma palavra que desperta curiosidade e desafia a imaginação. Na matemática,…

O que significa propriedades matemáticas?
Você já se perguntou o que significa propriedades matemáticas? Neste artigo, exploraremos…
O que significa axioma na matemática?
Você já se perguntou o que significa axioma na matemática? Bem, prepare-se…
O que significa capitalismo?
O que significa capitalismo? É um conceito que se desdobra em um verdadeiro oceano de interpretações e debates. Desde sua origem na Revolução Industrial até os dias atuais, o capitalismo abrange os pilares da propriedade privada, da livre iniciativa e do mercado competitivo. Mas, será que esse sistema econômico tem se mostrado eficiente e sustentável para todos? Exploraremos essas questões e muito mais neste artigo, mergulhando nas profundezas desse complexo sistema que molda nossa sociedade contemporânea.







O que significa a sigla ESG?
ESG, as sigla para "Environmental, Social and Governance", é um termo cada vez mais presente nas conversas sobre sustentabilidade e investimentos responsáveis. Representando critérios importantes para avaliar o desempenho de…